Types of constrains in mechanism or machines
Constrain means restriction. In mechanics, we got many redundant motions which need to restricted to save energy and work. We need to focus only on desired motion to get output from that mechanism. Sometimes these constrains are needed to be applied externally to restrict these additional redundant motions.
Types of constrains in mechanism or machines
There are several types of constraints in mechanisms:
- Kinematic Constraints: These are restrictions on motion and are used to define the type of motion that can occur between two links in a mechanism.
- Geometric Constraints: These are restrictions on the relative position and orientation of two links in a mechanism.
- Dynamic Constraints: These are restrictions on the forces and moments that can act on the links in a mechanism.
- Loading Constraints: These are restrictions on the loads that can be applied to the links in a mechanism.
- Control Constraints: These are restrictions on the control inputs that can be applied to the links in a mechanism.
- Path Constraints: These are restrictions on the path that a link in a mechanism can follow during its motion.
There are basically three types of constrains in mechanism or machine.
Completely constrained motion
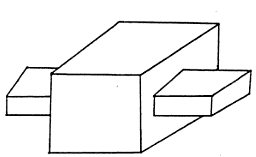
When relative motion between any tow machine elements is restricted to only one direction irrespective of the direction of force, then it is called completely constrained motion
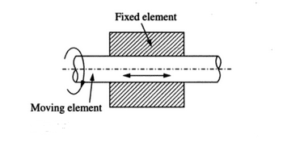
Successfully constrained motion
When relative motion between any two machine elements is possible in more than one direction, but it is made restricted to only one direction by some external means, then it is called successfully constrained motion.

For example, in piston and cylinder assembly, it can have reciprocal motion of piston rod and rotary motion of piston itself. Rotary motion of piston is restricted by specific design of piston rod and thus it results only single reciprocal motion which is desired.
What if the piston rotary motion is allowed? What is disadvantage? Think about it.
Same is the case of cam and follower with roller. Here rolling motion of roller is not desired. Only desired motion is follower’s reciprocal motion
Incompletely constrained motion
 When relative motion between any tow machine elements is possible in more than one direction and it also depends on direction of the force applied, then it is called incompletely constrained motion.
When relative motion between any tow machine elements is possible in more than one direction and it also depends on direction of the force applied, then it is called incompletely constrained motion.
Subscribe
If you enjoyed this article, subscribe to receive more just like it.