Classification of kinematic pairs with examples
Kinematic pairs can be classified on basis of their nature of contact, constraints, and nature of relative motion between the elements in contact. Here is the detailed classification of kinematic pairs with the relevant example. We can easily understand kinematic pairs once we understand the concept of degree of freedom.
Classification of kinematic pairs
According to nature of the contact
- Lower Pair: Having surface or area contact
Example: Nut-bolt, Bearing-Shaft
- Higher Pair: Having point or line contact

Example: Cam-follower, rolling wheel of the plane surface
- Wrapping pair: It is similar to higher pair but contain multiple point contacts.
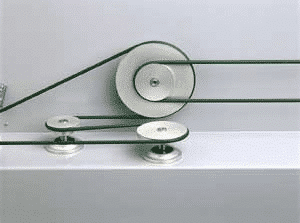
Example: Belt drive with pulleys
Belt has multiple point contact with each pully.
Note: Higher pair involves two dissimilar surface contact.
According to constrains
- Open pair: When contact between elements of the pair are due to gravity or external force i.e. spring
Example: cam-follower
- Closed pair: In a closed pair, contact between elements of the pair are held mechanically. We can break the contact by the destruction of at least one of the elements.
Note: All lower pair are closed pair
According to nature of relative motion
- Sliding pair: having sliding relative motion.
Example: rectangular rod in a rectangular hole
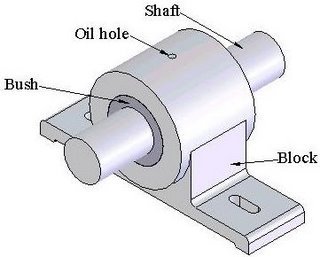
- Turning pair: Having turning relative motion
Example: shaft revolving in bearing
- Rolling pair: Having a relatively rolling motion
Example: balls of bearing

- Screw pair: Having turning as well as sliding motion.
Example: Nut-bolt
- Sp
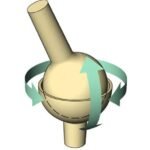 herical pair: Having a relatively spherical motion
herical pair: Having a relatively spherical motion
Example: Joint of side glass of bike
Types of joints
- Binary Joint: When two links are joined at the same connection
- Ternary Joint: When three links are joined at the same connection
- Quaternary Joint: When four links are joined at the same connection. It is equivalent to three ternary joints.
Note: If n number of links are connected at a joint, it is equivalent to (n-1) binary joints
This is all about the classification of kinematic pairs in mechanics.
Subscribe
If you enjoyed this article, subscribe to receive more just like it.